

PuduBot
Intelligenter Servierroboter

Der intelligente Servierroboter PuduBot macht das Servieren einfach wie noch nie.
Man muss ihn sehen, um es zu glauben.
Das neue VSLAM-System des PuduBots ermöglicht eine präzisere Ortung und einen stabileren Betrieb.
Verfolgbar
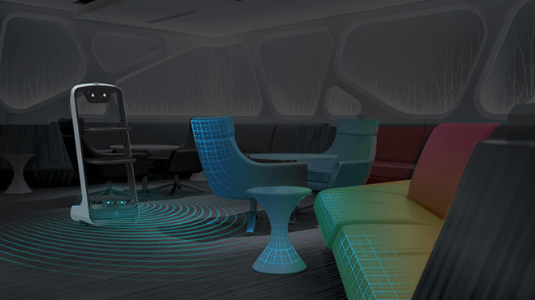
Der revolutionäre Weg zur 3D-Hindernisumgehung ermöglicht eine schnellere Wahrnehmung und dadurch sicheres Servieren.
PD1 und PD6
Der BellaBot verfügt über eine innovative, bionische Gestaltung. Er ist von der Höhe des Maschinenrumpfs über die Bildschirmneigung bis hin zur Formkurve einfach perfekt ausgeführt.
EINSTELLBARE ABLAGE
Metallablage PD1 mit 42*50cm
Metallablage PD6 mit 35*40cm
INTERAKTIVE LICHTLEISTE
Deutlichere Bedienungsanleitung
LIDAR
Radar der neuen Generation
Effizientere SLAM-Lagepläne
ALLGEMEINE TONAUSGABE
HiFi-Tonausgabe mit bis zu 2*30 W
Herausragendere Soundeffekte

OPTISCHE ORTUNG
Neues Optiksystem
Präzisere Ortung
VOLLALUMINIUMGEHÄUSE
Acryl/Aluminiumlegierung in Luftfahrtqualität
Stabilere Konstruktion
3D-HINDERNISUMGEHUNG
Neue 3D-Kamerasensoren
Sicheres Servieren
NEUE AUFHÄNGUNG
Wird auch mit unebenem Boden fertig
Stabilerer Betrieb
Beispiellose Neuentwicklung

Pudu Slam
PUDU SLAM ist ein neues integriertes SLAM-System mit Lidar, Kamera, UWB, RGBD, IMU, Encoder und mehreren Sensoren. Dadurch kann der Roboter seinen Aufgaben auch in einem unübersichtlichen Umfeld nachgehen.
Umgebungswahrnehmung
Sicherheit und Hindernisumgehung wurden erheblich verbessert, so dass der Roboter sich weniger leicht an hängenden Objekten oder anderen Hindernissen im toten Winkel verfängt. Zum Lidar kamen etliche optische Fühler hinzu, mit denen der Roboter von der 2D-Ebenenwahrnehmung zur 3D-Rundumerfassung übergeht.

3D-Hinderniserkennung
Gegenüber herkömmlichem 2D-Radar können 3D-Stereofühler die Umgebung dreidimensional abbilden und dadurch Unfälle viel besser vermeiden.
Scheduler
Der ZEITPLAN nutzt einen dezentrales, flexibles Instantnetzwerk nebst Algorithmusarchitektur zur Kommunikation. Jeder Roboter kann direkt mit jedem anderen im selben Netz kommunizieren und zügig Berechnungen und Entscheidungen vornehmen. So wird das Netz weniger belastet, der zentrale Rechenknoten erfordert weniger Leistung, und die Roboter verhalten sich menschenähnlicher.

Abmessungen: 516*500*1288mm
Gewicht: PD1 35kg, PD6 40kg
Behälter: 422*422*710mm
Behälter: 422*422*710mm
Werkstoffe: ABS/Aluminiumlegierung
in Luftfahrtqualität
Aufladezeit: 4h
Akkulaufzeit: 10-24h
Geschwindigkeit: 0,5-1,2 m/s (einstellbar)
Ladekapazität: bis 30 kg, PD1/6 13/10kg/Ablage